what family of projections does the us national atlas equal area projection belong to
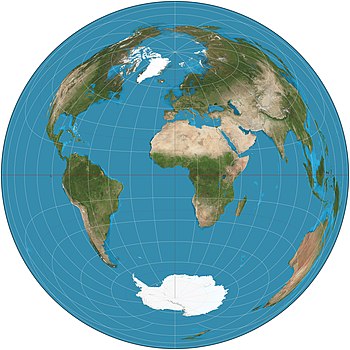
Lambert azimuthal equal-expanse projection of the world. The center is 0° Due north 0° E. The antipode is 0° N 180° E, almost Kiribati in the Pacific Ocean. That point is represented by the entire circular purlieus of the map, and the ocean around that point appears forth the unabridged boundary.

The Lambert azimuthal equal-area projection is a particular mapping from a sphere to a disk. It accurately represents area in all regions of the sphere, simply it does not accurately correspond angles. Information technology is named for the Swiss mathematician Johann Heinrich Lambert, who announced it in 1772.[1] "Zenithal" existence synonymous with "azimuthal", the projection is also known as the Lambert zenithal equal-area projection.[2]
The Lambert azimuthal project is used every bit a map projection in cartography. For instance, the National Atlas of the US uses a Lambert azimuthal equal-area projection to display data in the online Map Maker application,[3] and the European Environment Agency recommends its usage for European mapping for statistical analysis and brandish.[4] It is also used in scientific disciplines such as geology for plotting the orientations of lines in three-dimensional space. This plotting is aided past a special kind of graph paper called a Schmidt net.[5]
Definition [edit]

A cross sectional view of the sphere and a aeroplane tangent to it at S. Each point on the sphere (except the antipode) is projected to the plane along a circular arc centered at the point of tangency between the sphere and aeroplane.
To define the Lambert azimuthal projection, imagine a plane prepare tangent to the sphere at some point S on the sphere. Let P be whatever point on the sphere other than the antipode of S. Let d exist the distance betwixt S and P in three-dimensional space (not the distance along the sphere surface). Then the projection sends P to a point P′ on the aeroplane that is a distance d from Southward.
To make this more precise, there is a unique circle centered at S, passing through P, and perpendicular to the airplane. It intersects the plane in two points; permit P′ exist the i that is closer to P. This is the projected indicate. Run into the effigy. The antipode of S is excluded from the projection considering the required circle is non unique. The example of S is degenerate; S is projected to itself, along a circle of radius 0.[6]
Explicit formulas are required for carrying out the projection on a figurer. Consider the projection centered at S = (0, 0, −1) on the unit of measurement sphere, which is the set up of points (x, y, z) in 3-dimensional space R 3 such that x 2 + y 2 + z ii = one. In Cartesian coordinates (x, y, z) on the sphere and (X, Y) on the airplane, the projection and its inverse are and so described by

In spherical coordinates (ψ, θ) on the sphere (with ψ the colatitude and θ the longitude) and polar coordinates (R, Θ) on the deejay, the map and its inverse are given by [6]

In cylindrical coordinates (r, θ, z) on the sphere and polar coordinates (R, Θ) on the plane, the map and its inverse are given past

The projection tin be centered at other points, and defined on spheres of radius other than one, using like formulas.[seven]
Properties [edit]
As defined in the preceding section, the Lambert azimuthal projection of the unit of measurement sphere is undefined at (0, 0, ane). Information technology sends the balance of the sphere to the open deejay of radius two centered at the origin (0, 0) in the airplane. It sends the point (0, 0, −one) to (0, 0), the equator z = 0 to the circle of radius √2 centered at (0, 0), and the lower hemisphere z < 0 to the open disk contained in that circumvolve.
The projection is a diffeomorphism (a bijection that is infinitely differentiable in both directions) between the sphere (minus (0, 0, 1)) and the open disk of radius 2. Information technology is an area-preserving (equal-surface area) map, which can be seen past computing the area element of the sphere when parametrized by the inverse of the projection. In Cartesian coordinates it is

This means that measuring the area of a region on the sphere is tantamount to measuring the surface area of the corresponding region on the disk.
On the other mitt, the projection does not preserve athwart relationships amongst curves on the sphere. No mapping between a portion of a sphere and the plane can preserve both angles and areas. (If 1 did, then it would be a local isometry and would preserve Gaussian curvature; just the sphere and disk have different curvatures, so this is impossible.) This fact, that flat pictures cannot perfectly correspond regions of spheres, is the cardinal problem of cartography.
Every bit a consequence, regions on the sphere may be projected to the plane with greatly distorted shapes. This distortion is particularly dramatic far away from the center of the projection (0, 0, −1). In practice the project is often restricted to the hemisphere centered at that point; the other hemisphere can be mapped separately, using a second project centered at the antipode.
Applications [edit]
The Lambert azimuthal project was originally conceived as an equal-area map project. It is now likewise used in disciplines such as geology to plot directional data, as follows.
A direction in three-dimensional infinite corresponds to a line through the origin. The set of all such lines is itself a space, called the existent projective plane in mathematics. Every line through the origin intersects the unit sphere in exactly two points, one of which is on the lower hemisphere z ≤ 0. (Horizontal lines intersect the equator z = 0 in two antipodal points. Information technology is understood that antipodal points on the equator stand for a single line. Come across quotient topology.) Hence the directions in 3-dimensional infinite stand for (nearly perfectly) to points on the lower hemisphere. The hemisphere can then be plotted as a disk of radius √2 using the Lambert azimuthal project.
Thus the Lambert azimuthal project lets us plot directions every bit points in a disk. Due to the equal-area holding of the projection, one can integrate over regions of the real projective plane (the space of directions) by integrating over the respective regions on the disk. This is useful for statistical analysis of directional data,[half-dozen] including random rigid rotation.[8]
Non only lines only also planes through the origin tin can be plotted with the Lambert azimuthal projection. A plane intersects the hemisphere in a circular arc, chosen the trace of the plane, which projects downwardly to a curve (typically not-circular) in the disk. I can plot this curve, or one can alternatively supersede the plane with the line perpendicular to it, called the pole, and plot that line instead. When many planes are beingness plotted together, plotting poles instead of traces produces a less cluttered plot.
Researchers in structural geology utilize the Lambert azimuthal projection to plot crystallographic axes and faces, lineation and foliation in rocks, slickensides in faults, and other linear and planar features. In this context the project is called the equal-area hemispherical projection. There is also an equal-angle hemispherical projection defined by stereographic projection.[vi]
The discussion here has emphasized an inside-out view of the lower hemisphere z ≤ 0 (as might be seen in a star chart), but some disciplines (such as cartography) adopt an outside-in view of the upper hemisphere z ≥ 0.[6] Indeed, any hemisphere can be used to record the lines through the origin in three-dimensional space.

Comparison of the Lambert azimuthal equal-area projection and some azimuthal projections centred on 90° N at the same scale, ordered by projection altitude in Earth radii. (click for detail)
Animated Lambert projection [edit]
[ commendation needed ]

Blitheness of a Lambert projection. Each grid prison cell maintains its area throughout the transformation. In this animation, points on the equator remain always on the aeroplane.


In this blithe Lambert projection, the south pole is held fixed.
Let exist two parameters for which and . Let be a "time" parameter (equal to the top, or vertical thickness, of the beat out in the animation). If a uniform rectilinear filigree is drawn in infinite, and so whatever point in this filigree is transformed to a point on a spherical trounce of meridian according to the mapping








where . Each frame in the blitheness corresponds to a parametric plot of the deformed grid at a fixed value of the shell peak (ranging from 0 to 2). Physically, is the stretch (deformed length divided by initial length) of infinitesimal line line segments. This mapping tin be converted to one that keeps the south pole fixed past instead using
![{\displaystyle \lambda (u,H)={\frac {1}{2}}{\sqrt {(1-u)\left[8-H^{2}(1-u)\right]}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4cf3eaae0a7651d0fcc7f6b38101f8c6848b7ad8)



Regardless of the values of , the Jacobian of this mapping is everywhere equal to 1, showing that information technology is indeed an equal surface area mapping throughout the animation. This generalized mapping includes the Lambert projection equally a special case when .


Application: this mapping can assist in explaining the significant of a Lambert projection by showing information technology to "pare open" the sphere at a pole, morphing it to a disk without changing surface area enclosed by filigree cells.
See also [edit]
- List of map projections
- Azimuthal equidistant projection
- European grid
- Hammer projection
References [edit]
- ^ Mulcahy, Karen. "Lambert Azimuthal Equal Area". City University of New York. Retrieved 2007-03-30 .
- ^ The Times Atlas of the World (1967), Boston: Houghton Mifflin, Plate 3, et passim.
- ^ "Map Projections: From Spherical Earth to Flat Map". United States Department of the Interior. 2008-04-29. Archived from the original on 2009-05-07. Retrieved 2009-04-08 .
- ^ "Short Proceedings of the 1st European Workshop on Reference Grids, Ispra, 27-29 Oct 2003" (PDF). European Environment Agency. 2004-06-14. p. 6. Retrieved 2009-08-27 .
- ^ Ramsay (1967)
- ^ a b c d e Borradaile (2003).
- ^ "Geomatics Guidance Note seven, part ii: Coordinate Conversions & Transformations including Formulas" (PDF). International Association of Oil & Gas Producers. September 2016. Retrieved 2017-12-17 .
- ^ Brannon, R.M., "Rotation, Reflection, and Frame Change", 2018
Sources [edit]
- Borradaile, Graham J. (2003). Statistics of Earth science data. Berlin: Springer-Verlag. ISBN3-540-43603-0.
- Do Carmo; Manfredo P. (1976). Differential geometry of curves and surfaces. Englewood Cliffs, New Jersey: Prentice Hall. ISBN0-thirteen-212589-7.
- Hobbs, Bruce E., Means, Winthrop D., and Williams, Paul F. (1976). An outline of structural geology . New York: John Wiley & Sons, Inc. ISBN0-471-40156-0.
{{cite volume}}: CS1 maint: multiple names: authors list (link) - Ramsay, John G. (1967). Folding and fracturing of rocks. New York: McGraw-Hill.
- Spivak, Michael (1999). A comprehensive introduction to differential geometry. Houston, Texas: Publish or Perish. ISBN0-914098-70-5.
External links [edit]
- Explanation of according conversions with diagrams
-
 Media related to Lambert azimuthal equal-area projection at Wikimedia Eatables
Media related to Lambert azimuthal equal-area projection at Wikimedia Eatables
lockettawalinis1955.blogspot.com
Source: https://en.wikipedia.org/wiki/Lambert_azimuthal_equal-area_projection
0 Response to "what family of projections does the us national atlas equal area projection belong to"
Post a Comment